Recojo aquí un extracto del contenido del Capítulo 3 de mi libro “El Radar en la historia del siglo XX. Una de las armas decisivas de la Segunda Guerra Mundial”

Mástiles de las antenas receptoras (primer plano) y emisoras (al fondo) de la estación situada en Drone Hill, Coldingham Moor, Berwickshire, de la red Chain Home
Según vimos en un artículo anterior, tras las primeras demostraciones prácticas de las ideas de Robert Watson-Watt y gracias a sucesivas mejoras que proporcionaron un alcance cada vez mayor, el Gobierno Británico se convenció definitivamente de la necesidad de instalar una red de estaciones de emisores y detectores desplegadas a lo largo de la costa del Canal de la Mancha dedicadas a vigilancia y alerta temprana: nacía la primera red de alerta temprana de la historia basada en el radar: Chain Home (CH). No obstante, el camino no fue fácil. El desarrollo del CH durante el período que va desde 1935, cuando se realizaron las primeras experiencias científicas con las que se verificó su potencial, hasta su despliegue para la Batalla de Gran Bretaña fue una verdadera carrera contra el reloj plagada de dificultades, de fracasos y de logros técnicos que hicieron posible que el CH, con sus limitaciones, estuviera disponible para el comienzo de la guerra.
Cuando estuvo operativa, la red CH estaba compuesta por una veintena de estaciones operando a una frecuencia de f = 25 MHz, una frecuencia anormalmente baja para un radar, que era una de sus principales limitaciones. La primera demostración de su viabilidad y eficacia se hizo en abril de 1937. La mayoría de las estaciones estaban operativas en septiembre de 1938 y siguieron la trayectoria del avión en el que voló Neville Chamberlain -el Primer Ministro británico en ese momento-, a Múnich para firmar con Hitler, Mussolini y Daladier el Pacto de Múnich, que entregaba la región de los Sudetes de Checoslovaquia a Alemania. En el mismo mes, las estaciones de radar CH comenzaron a funcionar las 24 horas del día, lo que hicieron de forma ininterrumpida hasta el final de la guerra. Al estallar la guerra en septiembre de 1939, el sistema disponía de estaciones que cubrían el este y la mitad de la costa sur de Gran Bretaña. La siguiente figura muestra su zona de cobertura:
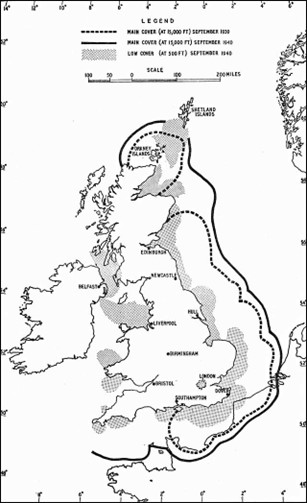
Zonas de cobertura de la red CH a una altura de 5 km. Línea discontinua: septiembre 1939, línea continua: septiembre 1940
CH era un radar pulsado, cuyas especificaciones técnicas principales eran las siguientes:
- Banda de frecuencias de trabajo: 20-30 MHz
- Potencia: 350 kW
- Alcance en condiciones óptimas: cercano a 300 km.
No obstante, CH distaba mucho de ser un sistema de defensa óptimo. Algunas de sus principales limitaciones eran las siguientes:
1. Presentación de los datos
En el CH, la información se presentaba de forma muy diferente a como se obtiene en los radares modernos. Las pantallas de radar de CH no se parecían en nada a las de los radares actuales, que disponen de un equipo de muestra de datos similar a un mapa circular con el radar situado en el centro y un vector radial que lo barre, iluminando los objetivos en el mapa a medida que se mueven. Este tipo de monitor se conoce en la actualidad por las siglas PPI (Plain Position Indicator, que puede traducirse por “Indicador Panorámico de Posición”); cada objetivo puede tener más información añadida (altura, naturaleza de la amenaza), se muestra en la figura:

Pantalla PPI de un radar moderno. La línea barre todo el círculo a la velocidad de rotación de la antena del equipo
Por el contrario, para obtener dicha información en CH, se requerían tres operaciones sucesivas. En primer lugar, la pantalla mostraba el alcance, rango o distancia a la que se encontraba el objetivo desde la ubicación del radar como un “punto luminoso” en una línea horizontal (un A-Scope en la terminología de radar actual) como se ilustra en la figura:
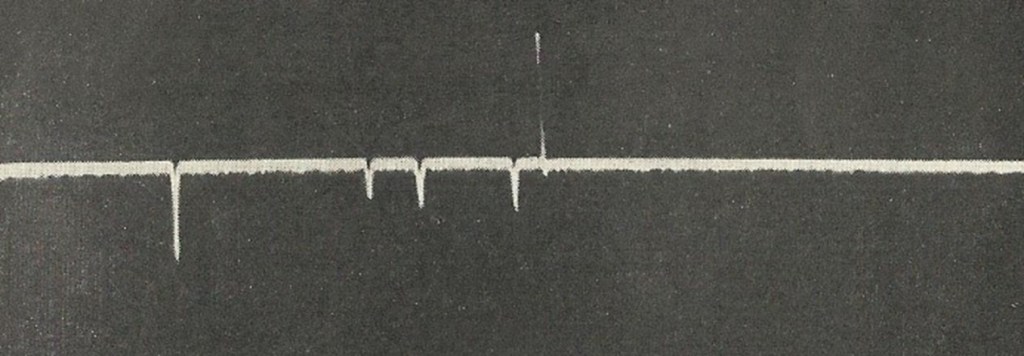
Pantalla de presentación de la información del radar británico CH en 1940, que muestra cuatro aviones representados por «señales luminosas» (“blips”) que apuntan hacia abajo. La traza que apunta hacia arriba es un marcador que se puede desplazar con un puntero que se mueve sobre una escala con objeto de mostrar la distancia a la que se encuentra el objetivo
A continuación, tras accionar un interruptor, se hacía una segunda lectura para obtener información acerca de la trayectoria seguida por el avión. Tras una nueva acción sobre el interruptor, se realizaba una tercera lectura, que informaba de la altura.
Cada estación tenía que ser revisada y calibrada periódicamente para asegurar que la información que proporcionaba de la altura y la trayectoria de los aviones enemigos era correcta. La altura era el parámetro más difícil de determinar, pues dependía de multitud de factores y requería de procesos de calibración que se efectuaban de manera casi continua con vuelos de prueba realizados por aviones propios de los que se conocía su altura de vuelo.
Las tres lecturas se reunían para obtener la distancia, la trayectoria y la altura de un posible avión enemigo. Parece evidente que tomar las tres lecturas podía llevar mucho tiempo y ser propenso a errores. Además, mientras se tomaban las lecturas, el avión agresor volaba a ~ 5-10 km/min, tiempo durante el que podía cambiar de trayectoria o de altura o de ambas. Como se puede deducir, eso traía una complicación tras otra, que las operadoras del sistema (eran en un 90% mujeres) debían resolverse en un corto espacio de tiempo. En este enlace se puede ver un vídeo explicativo del funcionamiento de la red Chain Home.
2. Las antenas emisoras y receptoras
Una de las numerosas singularidades de CH (y también origen de algunas de sus limitaciones) eran las antenas del sistema. Al ser la frecuencia de trabajo de la red f = 25 MHz, la longitud de onda asociada era grande (l = 12 m), lo que requería a su vez de antenas de grandes dimensiones. Las antenas de transmisión de cada estación se agrupaban en cuatro mástiles de 120 metros de altura, separados entre sí 60 metros, entre los cuales se colgaban los cables de la antena, tal y como se muestra en la siguiente figura:

Arriba: imagen de las antenas del sistema CH. A la izquierda, las torres de los emisores, a la derecha, las antenas receptoras. Abajo: detalle de ambos sistemas, con las dimensiones expresadas en pulgadas
Las antenas receptoras consistían en una agrupación de dipolos situados en una torre de 80 m. de altura. Las torres se construían con madera en lugar de acero, para evitar influir en el equilibrio y la simetría de los dipolos receptores por la proximidad de cualquier parte metálica. Las torres, colocadas a intervalos regulares y a las que se accedía mediante una escalera central, se muestran en la parte inferior de la figura anterior. Había tres grupos de dipolos espaciados uno encima de otro, identificadas como “A” a una altura media de 70 m, “B” a 30 m y “C” a 15 m. Los dipolos C se utilizaban en ciertas circunstancias en las que los dipolos A y B no trabajaban normalmente y servían para la determinación de la altura del objetivo, pero no de la trayectoria. Por decirlo claramente, la instalación tenía unas dimensiones extremadamente grandes. Esta disposición tenía por objeto lograr que la direccionalidad de las antenas receptoras fuera elevada en dirección hacia la costa de Francia, que es por donde vendrían las formaciones de bombarderos alemanes.
Fruto de esa distribución de los dipolos receptores, el sistema poseía numerosas zonas y alturas que no podía barrer, siendo el conjunto “ciego” a esas zonas. Según el diseño de la antena, la potencia de las transmisiones del radar se concentraba en áreas y alturas particulares, denominadas lóbulos. Entre estos lóbulos había áreas y alturas donde el sistema tenía poca o ninguna potencia transmitida y, por lo tanto, no había eco de regreso al receptor. Esos “huecos” o puntos ciegos se muestran esquemáticamente en la siguiente figura:
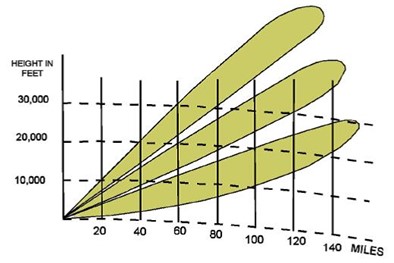
La curvatura del eje horizontal representa la forma en la que el manual de uso del sistema CH trataba de mostrar la curvatura de la Tierra. En este caso, una aeronave que viajara a una altura constante de 20.000 pies (7.000 m) sería detectada por CH a 135 millas de distancia (217 km), se perdería a 100 (161 km) millas y reaparecería a 80 millas (128 km), se perdería nuevamente a 60 millas (96 km) y reaparecería una vez más a 55 millas (88 km), para desaparecer de la pantalla a 40 millas (64 km). La habilidad y atención que debían mostrar los operadores del sistema para hacer frente a estas apariciones y desapariciones en la pantalla se pueden deducir fácilmente. Los aviones que volaban muy bajo solo podían ser detectados a distancias muy próximas a la estación del radar
Debido a la existencia de estas zonas ciegas, dos estaciones próximas podían dar lugar a dos trayectorias diferentes para un mismo avión. Estas discrepancias y confusiones se resolvían tras pasar la información por el “centro de filtrado” (Filter room) del sistema, que estaba ubicada en Bentley Priory, Stanmore, un barrio del norte de Londres donde se encontraba la sede del Cuartel General del Figther Command (Mando de Caza). La importancia de este elemento de CH era clave, según veremos en un próximo artículo.
Cuando la organización de la red estaba completamente desarrollada, el número de personas involucradas en la interpretación y el uso de la información suministrada por el radar era comparable al número necesario para obtenerla, lo que da idea de la complejidad del sistema. Debido a la escasez de personal capacitado y a las dificultades que entrañaba el mantenimiento de este tipo de equipo en tiempo de guerra, los diferentes puestos del sistema a menudo estaban mal instalados y mantenidos de manera inadecuada. En consecuencia, eran muy comunes los grandes errores en la determinación de la trayectoria aparente de una determinada formación de bombarderos alemanes: la mayoría de las estaciones tenían errores de 10° a 15°, y eran frecuentes errores de hasta 30°.

2 comentarios sobre “El sistema británico Chain Home. La primera red de alerta temprana de la historia”